Introducing eCognition software v10.5: Powerful tools for Geospatial data handling
We are excited to announce the release of Trimble eCognition software version 10.5, the latest version of our powerful geospatial data processing software. This release brings a host of new features and improvements designed to enhance your data handling capabilities, streamline workflows, and improve overall efficiency.
eCognition 10.5 introduces several new tools and algorithms that enable manual point cloud editing, offer new image segmentation strategies, and open opportunities for usage of deep learning models trained in different machine learning frameworks. These enhancements are aimed at providing geospatial professionals with more robust and flexible solutions for their data processing needs.
Some of the key benefits introduced for efficient geospatial data handling include:
A point cloud editing toolbar
Point clouds are becoming increasingly important in geospatial applications, providing detailed 3D data acquired through methods like static and mobile scanning, aerial lidar, and photogrammetry. As geospatial professionals adopt these technologies, the need for robust tools to manipulate and analyze point clouds grows.
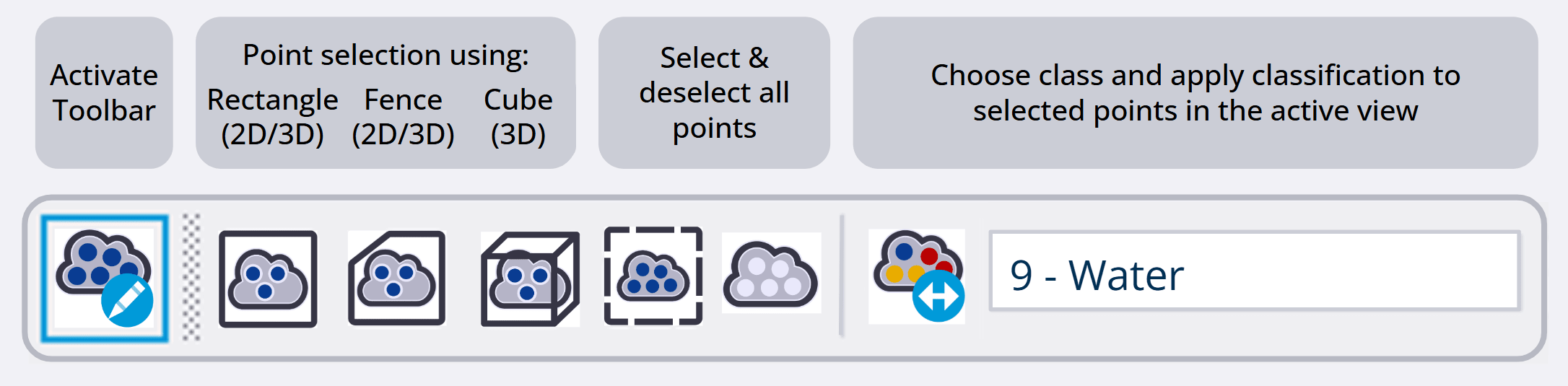
Image: Point cloud editing toolbar
eCognition already offers algorithms that allow manipulation of point clouds, including automated classification. eCognition v10.5 introduces a new toolbar designed specifically for point cloud editing. This addition enables manual editing capabilities, offering various modes for point selection and reclassification in both 2D and 3D views. The toolbar automatically opens when point cloud data is imported, streamlining your workflow and making it easier to leverage 3D data in your projects.
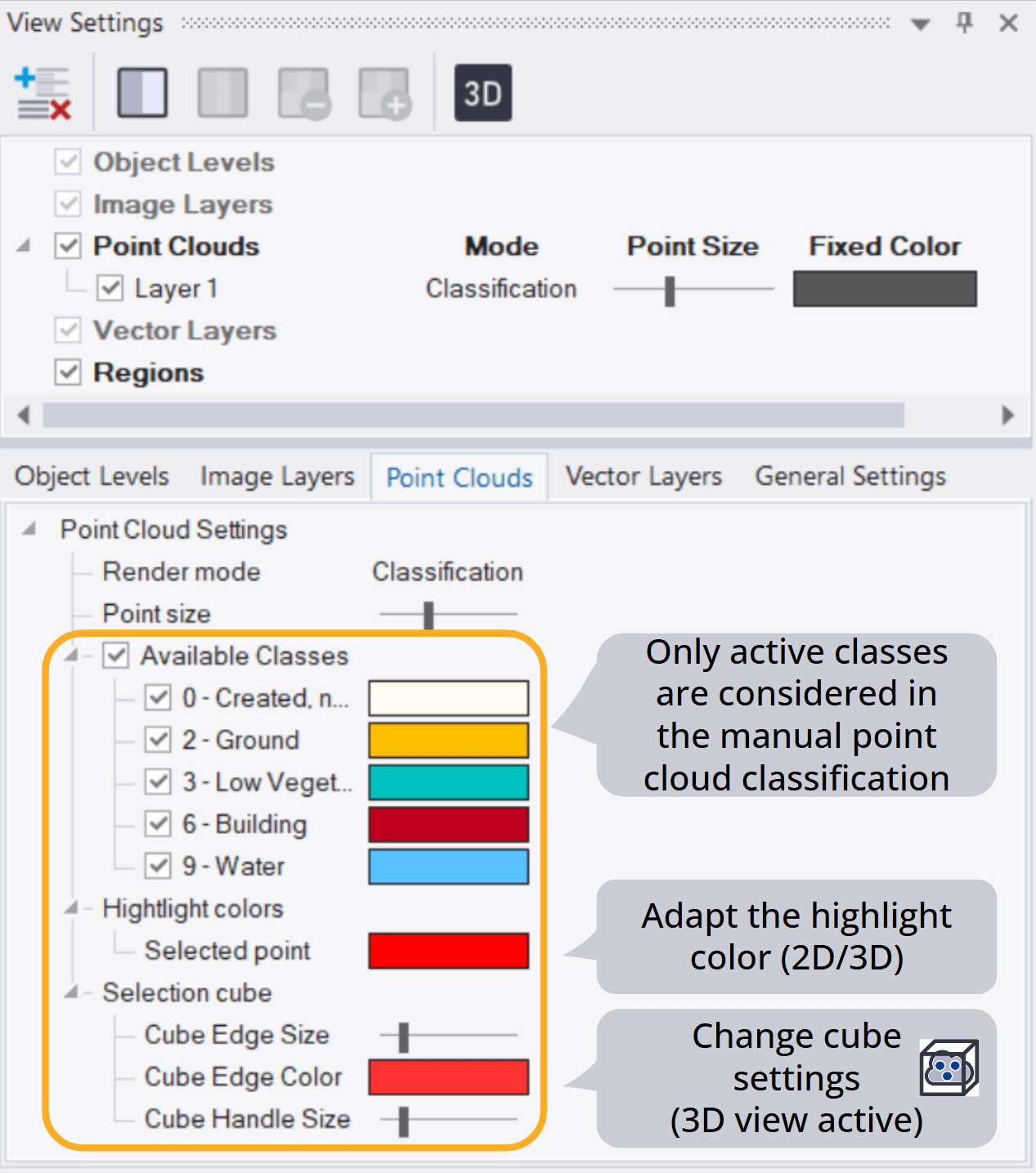
Image: Point cloud display settings
New segmentation algorithm based on Segment Anything Model (SAM)
In this release, we are introducing a new algorithm for segmentation of image data based on the Segment Anything Model (SAM) algorithm*. The algorithm offers three input modes for segmentation flexibility:
-
Everything: This mode segments images based on automatically created seeds, generating a segmentation grid to identify distinctive features. It's the simplest option but may not be suitable for large satellite imagery or orthomosaics with many small features due to the coarse grid.
-
Bounding boxes: Ideal for users with an object detection model that generates bounding boxes around objects of their interest, but ultimately they need semantic segmentation as their final deliverable. Users can apply the object detection model followed by SAM segmentation to obtain accurate outlines of each object. The input for this mode is a polygon or a line vector.
-
Points: Users can input a point vector for segmentation. The algorithm uses these points to generate a segmentation mask, outlining the object of interest by distinguishing relevant parts of the image.
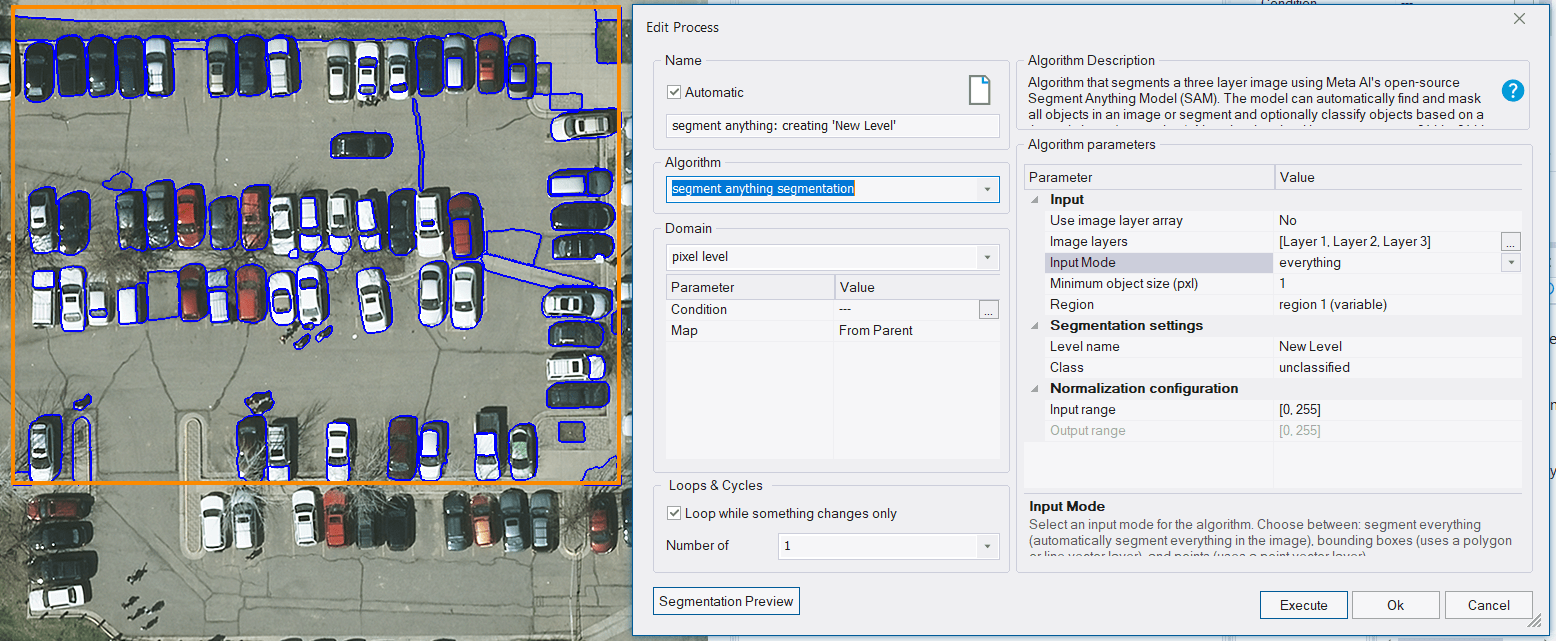
Image: SAM segmentation
DBSCAN Algorithm for Point Cloud Clustering
Point cloud classification is a great way to segment 3D point cloud data. However, a user often needs an inventory of objects which could include a location for each object or object count, such as the location and number of trees in a point cloud. The automated classification available in eCognition allowed users to classify objects, but it would be difficult to find each instance of the object and identify its location.
The new density-based spatial clustering of applications with noise (DBSCAN)-based point cloud clustering algorithm introduced in version 10.5 groups points that are close to each other into one instance of an object based on the user input point cloud class. After automated clustering, the algorithm will create a point per point cluster allowing a localization of every instance of an object in the point cloud and enabling easy object count.

Image: Using DBSCAN-based point cloud clustering
Deep learning and ONNX Model support
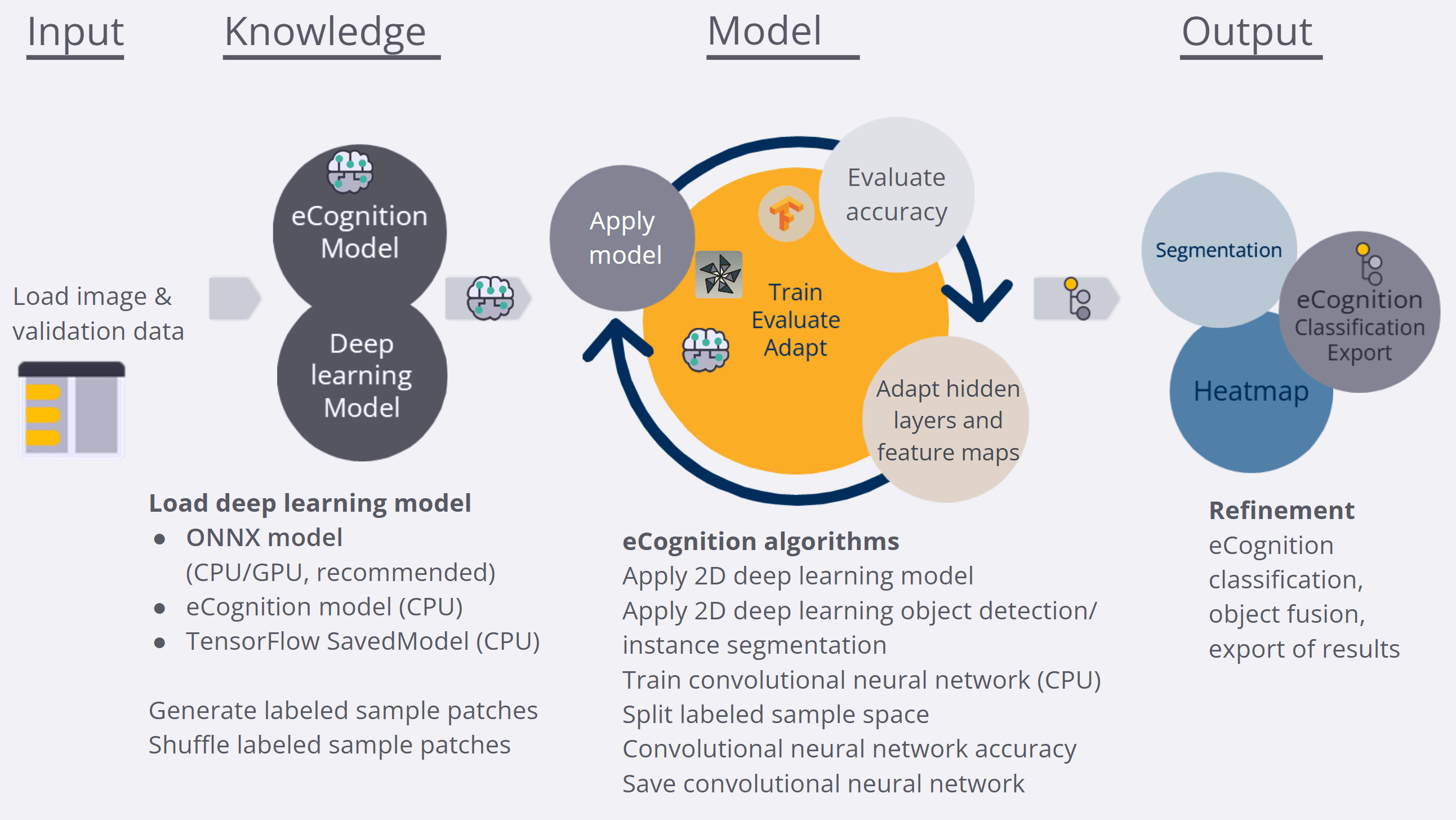
In previous releases, eCognition supported AI models trained outside the platform, but only if they were TensorFlow models. This limitation was restrictive, as the rapidly expanding AI community offers pre-trained models in various machine learning frameworks. As a ruleset developer, you don't want to be confined to TensorFlow.
With the latest release of eCognition, we are introducing support for ONNX models. ONNX (Open Neural Network Exchange) models allow users to import and run models trained in different machine learning frameworks, such as TensorFlow and PyTorch, without needing to retrain them for a specific platform.
Please note that eCognition and TensorFlow models are no longer supported on GPU. We encourage using ONNX models for new rulesets to take full advantage of this new capability.
Stay ahead with Trimble eCognition
eCognition version 10.5 is a significant step forward in geospatial data processing, offering powerful new tools and algorithms that enhance point cloud editing, image segmentation, and machine learning integration. With features like the Point Cloud Editing Toolbar, SAM-based segmentation, DBSCAN clustering, and ONNX model support, this release provides geospatial professionals with the flexibility and efficiency needed to tackle complex data processing tasks.
Stay connected, stay efficient, and stay ahead with Trimble eCognition.
Learn more about Trimble eCognition
The latest release of eCognition includes many other enhancements to improve your workflows. For a comprehensive list of all changes, refer to the Release Notes.
Upgrade to eCognition v10.5, visit our Downloads page.
New to eCognition? visit our Trial Download page.
For more information, visit our website or contact your local Trimble Distributor.
*To learn more about the Segment Anything Model (SAM) and how it is utilized in eCognition read this blog post.